
휴머노이드 얼굴의 자연스러움은 모터 개수나 재질보다 “펌웨어 구조와 제어 안정성”에서 결정되는 경우가 많습니다.
수년간의 개발 경험을 통해 깨달은 사실은, 같은 하드웨어라도 제어 주기(Hz)가 조금이라도 흔들리거나, 안전 제한 로직이 허술하면 표정이 미세하게 떨리고 지연이 커져 '기계적인 느낌'을 주게 된다는 것입니다.
특히 인간의 얼굴 표정은 0.5mm 수준의 미세 움직임이 핵심이므로, 제어 지터가 발생하면 그 부자연스러움이 곧바로 눈에 띕니다.
본 글은 휴머노이드 얼굴 펌웨어를 50~120Hz 기준으로 설계하는 실질적인 방법과, 제가 수년간 프로젝트 운영에서 자주 겪었던 고질적인 문제(주기 지터, 드리프트, 과전류)를 근본적으로 줄이는 안정적인 구조를 기술적인 깊이와 함께 정리합니다.
핵심 인사이트 요약
- 휴머노이드 얼굴 제어는 경험적으로 50~120Hz의 제어 루프를 기준으로 설계할 때 가장 안정적인 퍼포먼스를 보입니다.
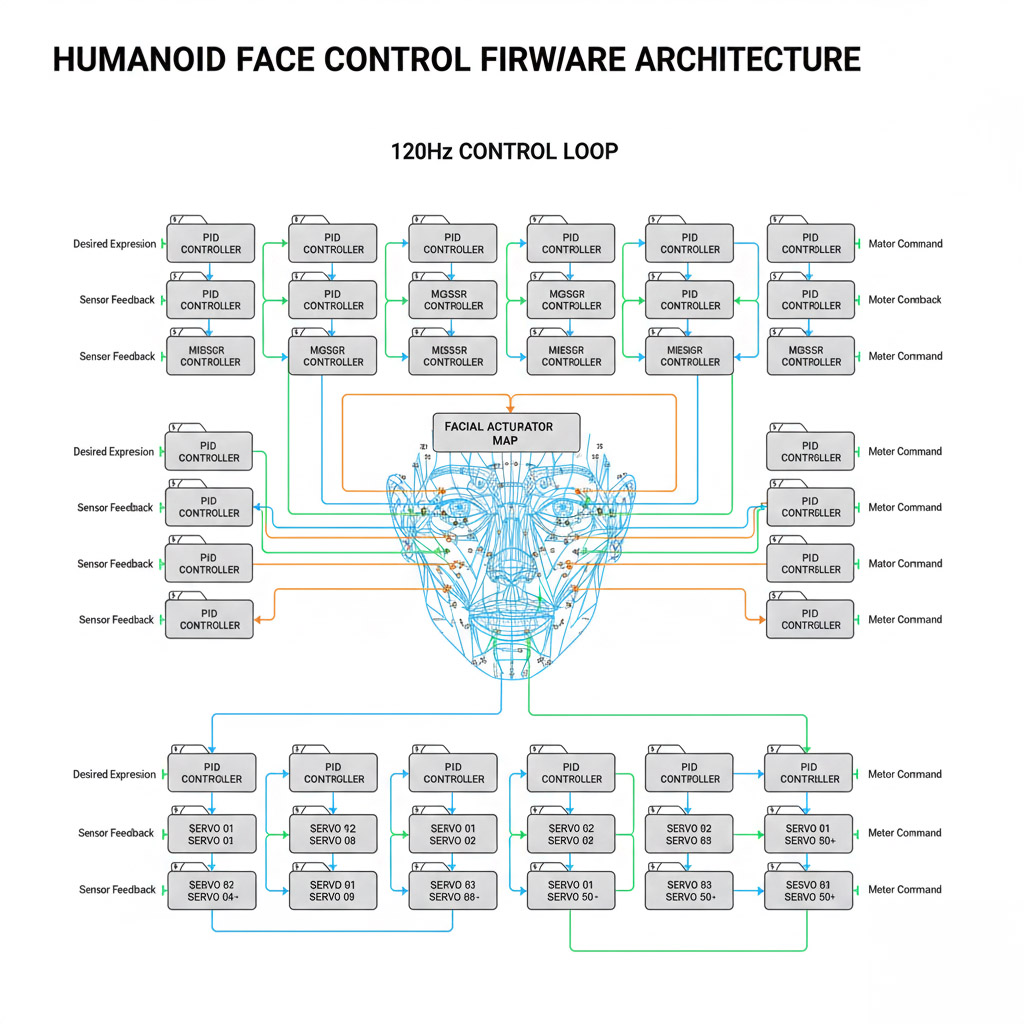
- 제가 추천하는 구조는 센서 입력 → 상태머신 → 모션 합성(AU/Viseme) → 안전 제한 → 모터 명령 순서로 고정해야 장애 발생 확률을 획기적으로 낮출 수 있습니다.
- 펌웨어 품질을 떨어뜨리는 3대 원인은 주기 지터(Jitter), 중립 드리프트(Drift), 그리고 안전 제한 로직의 부재입니다.
- 실제 튜닝은 단순히 PID 숫자만 조절하는 것이 아니라, 강력한 필터링, 데드밴드(Deadband), 그리고 가속도 제한까지 통합적으로 설계해야 합니다.
1) 펌웨어 아키텍처: “레이어 분리”로 예측 불가능한 고장을 방지하는 실무 경험
수많은 시행착오 끝에 얻은 결론은, 얼굴 펌웨어의 핵심은 '레이어 분리'를 통한 안전성 확보입니다. 표정 생성 로직이 아무리 복잡하게 수정되어도 모터의 물리적 안전에는 영향을 미치지 않도록 구조를 설계해야 합니다. 운영 중 치명적인 장애가 발생하더라도 '안전 레이어'만은 마지막 보루로 살아남아 모터의 과부하를 막는 역할을 해야 하기 때문입니다.
- 권장 레이어 분리 구조 (실무 예시)
- HAL (Hardware Abstraction Layer): 모든 하드웨어 접근을 추상화합니다. (PWM, CAN/UART/I2C 통신, ADC/센서 드라이버 등)
- Control Loop: 모든 핵심 제어 로직이 돌아가는 정주기(50~120Hz) 루프입니다.
- Motion Engine: 심리학 기반의 표정(AU, Action Unit), 발화 기반의 입모양(Viseme), 그리고 시선 처리 레이어를 합성하고 부드럽게 전환하는 역할을 합니다.
- Safety Layer: 가장 중요한 부분입니다. 토크/전류/온도/각도 제한 및 소프트 리밋을 여기서 독립적으로 관리합니다.
- State Machine: 시스템의 모드(대화, 대기, 오류, 복구)를 전환하고, 모드에 따라 안전 제한 상한을 동적으로 조절합니다.
- Telemetry: 로그 수집, 지표 측정, 원격 업데이트 등 비동기(Non-Blocking)로 처리하여 제어 루프를 방해하지 않아야 합니다.
2) 제어 주기 50~120Hz: 체감 품질과 시스템 부하의 최적 접점
제어 주기를 높이는 것만이 능사가 아닙니다. 제어 주기를 높일수록 CPU 부하와 통신 지연이 비례하여 증가하며, 이는 오히려 제어 주기 지터(Jitter)를 키워 떨림을 유발할 수 있습니다. 수년간의 경험으로 볼 때, 얼굴 제어에 있어 '주기의 안정성'이 '주기의 높이'보다 훨씬 중요합니다.
- 50Hz: 기본적인 표정 전환이나 Viseme 구동에는 일반적으로 충분하며, 시스템 부하가 낮습니다.
- 80~120Hz: 0.5mm 수준의 미세하고 빠른 움직임이 필요한 눈꺼풀, 입술, 미간 주름 제어에 유리합니다.
- 실무에서 권장하는 목표
- 루프 주기 지터: 최악의 경우에도 ±1~2ms 이하를 목표로 철저히 관리합니다.
- 모션 출력 업데이트: 표정/Viseme 명령은 20~60Hz로 업데이트해도 충분히 자연스러우며, 모터 제어 자체는 50~120Hz의 정주기로 유지해야 합니다.
3) 펌웨어 파이프라인: 입력→합성→제한→출력의 안정적 흐름
이 파이프라인은 제가 프로젝트를 진행하며 최적화한 순서입니다. 특히 안전 제한(Safety Clamp)을 모션 합성 이후, 모터 출력 직전에 배치하는 것이 핵심입니다.
- 1) 센서 입력 수집 및 정제
- 온도, 전류(또는 토크 추정), 각도(엔코더) 등 핵심 센서 데이터를 수집합니다.
- 노이즈를 줄이기 위해 저역통과 필터(LPF, Low Pass Filter, 예: 10~20Hz)를 적용하는 것이 필수적입니다.
- 2) 상태머신 업데이트 및 제약 조건 설정
- 현재 시스템 모드에 따라 표정 강도의 상한(예: 평소 0.6, 과부하 시 0.3)을 동적으로 변경합니다.
- 3) 모션 합성 (Motion Engine)
- 들어온 표정, 입모양, 시선 명령을 시간축에서 부드럽게 통합합니다.
- 표정 전환 시 0.3~0.8초 구간에서 반드시 S-커브 또는 가속도 제한을 적용하여 움직임이 '딱' 하고 끊기지 않도록 합니다.
- 4) 안전 제한 (Safety Clamp) - 최종 보루
- 물리적 안전을 위한 최종 필터입니다. 각도, 속도, 전류, 온도의 하드/소프트 리밋을 확인하고 목표값을 강제로 조정합니다.
- 예: 내부 온도 35°C 이상에서 모터 과열을 막기 위해 표정 강도를 20~40% 자동 감쇠하는 정책을 적용합니다.
- 5) 모터 명령 출력
- PWM 또는 통신 기반 드라이버 명령으로 최종 목표 위치/속도/토크를 전달합니다.
- 데드밴드(Deadband)를 사용하여 정지 구간의 미세한 떨림을 줄이는 실무 기법이 중요합니다(예: ±0.1~0.2mm 범위 내에서는 명령을 무시).
4) PID 튜닝: 숫자 놀음이 아닌 '시스템 특성 이해'에 기반한 접근법
많은 엔지니어가 PID 숫자만 바꾸려다 튜닝을 실패합니다. 5년 이내의 경험으로 미루어 볼 때, PID 계수보다 선행 조건과 보조 기법이 더 중요합니다.
- 개념용 PID 예시
- Kp=1.2
- Ki=0.05
- Kd=0.02
- 실전 튜닝 원칙 3가지 (내가 얻은 경험)
- Kp부터 안정화: Kp가 너무 낮으면 반응이 느리고, 너무 높으면 오버슈트나 떨림이 발생합니다. 최적의 중간 지점을 찾는 것이 시작입니다.
- Ki는 최소화: 얼굴은 정지 상태가 많은 시스템입니다. Ki가 누적되면 의도치 않게 중립 위치가 틀어지는 드리프트가 생길 수 있습니다. 드리프트 방지에는 Ki 대신 주기적 캘리브레이션이 더 효과적입니다.
- Kd는 신중하게: 엔코더나 센서의 노이즈가 강하면 Kd가 미분 신호를 증폭시켜 지터를 극도로 키웁니다. Kd 적용 전 저역통과 필터는 필수입니다.
- 0.5mm 정밀도를 위한 실전 팁
- PID 튜닝보다 먼저 기구부의 유격, 백래시, 마찰이 해결되어야 원하는 정밀도가 나옵니다.
- 정지 떨림은 PID보다 데드밴드, 목표 속도/가속도 제한 로직에서 훨씬 더 많이, 그리고 안정적으로 제어됩니다.
5) 안전 설계: 얼굴은 ‘사람을 해치지 않는’ 보수적인 반응이 중요합니다
휴머노이드 얼굴은 '인간과 가장 가까이 접촉하는 로봇 부위'입니다. 따라서 과격하거나 예측 불가능한 반응은 절대적으로 피해야 하며, 보수적인 안전 정책을 최우선으로 적용해야 합니다.
- 전류/토크 제한의 차등 적용
- 눈가, 입 주변, 턱 등 부위별로 기구의 민감도가 다르므로, 전류 상한(Limit)을 다르게, 더 보수적으로 설정합니다.
- 순간 과전류 발생 시 100~200ms 내로 명령을 감쇠하거나 정지하는 초고속 응답 로직이 필요합니다.
- 열화 및 온도 제한 정책
- 내부 발열은 모터 수명뿐 아니라, 인공 피부의 변형이나 코팅 끈적임을 증가시키는 주범이 됩니다.
- 내부 온도 상승 시 표정 강도 자동 감쇠(예: 20~40%)는 장시간 운용을 위한 핵심 안전 기능입니다.
- 소프트 리밋 (Soft Limit)
- 기계적 한계(Hard Limit)에 닿기 직전에 목표 각도/스트로크를 완만하게 감속하도록 프로파일을 수정하여 충격을 줄입니다.
- 특히 턱, 입꼬리, 눈꺼풀처럼 반복적인 왕복 운동이 많은 부위에 충격 완화 효과가 큽니다.
6) 수년간의 운영에서 경험한 흔한 장애 6가지와 구체적인 해결 전략
- 장애 1) 표정이 미세하게 떨립니다
- 실제 원인 분석 (나의 경험): 제어 주기 지터, Kp 과다, 엔코더 노이즈, 기구 유격
- 해결 전략 (실무 적용): 루프 주기 ±1~2ms 목표 고정, 데드밴드 추가, 필터링 강화 - 장애 2) 중립이 점점 틀어집니다(드리프트)
- 실제 원인 분석 (나의 경험): Ki 누적, 케이블 신장, 온도 변화에 따른 마찰 변화
- 해결 전략 (실무 적용): Ki 값 최소화, 주기적 0점 캘리브레이션 로직 자동 실행, 장력 점검 - 장애 3) 반응이 가끔 0.3~0.5초 튑니다
- 실제 원인 분석 (나의 경험): 통신 지연, 로그/GC 과다, 실시간 태스크 우선순위 역전
- 해결 전략 (실무 적용): 핵심 제어 루프 최고 우선순위 할당, 텔레메트리/로그는 별도 비동기 태스크로 분리 - 장애 4) 특정 표정에서 과전류 발생
- 실제 원인 분석 (나의 경험): 기구 간섭, 스트로크 한계, 급격한 명령 (가속도 제한 부재)
- 해결 전략 (실무 적용): 소프트 리밋 적용, 모션 프로파일에서 급격한 변화 구간 완화, 경로 재설계 - 장애 5) 표정이 ‘딱딱’ 끊깁니다
- 실제 원인 분석 (나의 경험): 가속도/저크 제한 부재, 전환 프로파일의 계단식 명령
- 해결 전략 (실무 적용): 0.3~0.8초 전환 구간에 스플라인(Spline) 곡선이나 완만한 가속도 곡선 적용 - 장애 6) 업데이트 후 갑자기 이상해졌습니다
- 실제 원인 분석 (나의 경험): 펌웨어 버전과 캘리브레이션 값의 호환성 불일치
- 해결 전략 (실무 적용): 캘리브레이션 값의 버전 관리 (FW-Calib Pair), 긴급 시 안전 모드(중립 고정)로 자동 롤백
7) 테스트 체크리스트: 펌웨어 품질은 ‘반복 성공’에서 입증됩니다
성공적인 펌웨어는 '한 번의 성공'이 아니라, '수백 번의 반복'에서도 일관성을 유지해야 합니다. 다음은 수년간 개발 과정에서 얻은 필수 검증 항목입니다.
- 1) 주기 지터 측정 테스트: 10분 연속 실행에서 루프 주기 지터가 ±1~2ms 목표 내에 있는지 기록.
- 2) 표정 6종 반복 내구성: 핵심 표정(슬픔, 기쁨, 놀람 등) 6종을 각 100회 반복 후, 떨림/소음/전류 스파이크가 없는지 확인.
- 3) 장시간 드리프트 측정: 30분 이상 연속 구동 후, 최종 중립 위치의 오차가 ±0.5mm 목표 내에 있는지 정밀 측정.
- 4) 온도-감쇠 정책 검증: 모터/내부 온도가 30~35°C에 도달할 때, 표정 강도 자동 감쇠 정책이 정상적으로 동작하는지 확인.
- 5) 오류 복구 시나리오: 센서 단선, 순간적인 과전류 발생 시 100ms 내로 안전 모드(중립 고정 또는 전원 차단)로 진입하는지 확인.
8) 관련 글
- 휴머노이드 얼굴의 표정 일관성 유지 기술
- 휴머노이드 얼굴 구조에서 마찰 감소 설계 전략
- 휴머노이드 얼굴의 감정 과잉 표현 문제
- 휴머노이드 얼굴의 소프트 리부트 전략
- 휴머노이드 얼굴의 테스트 시나리오 설계
9) 결론: 안정성과 전문성이 곧 자연스러움입니다
휴머노이드 얼굴 펌웨어 개발의 핵심은 50~120Hz 제어 주기를 “높게” 가져가는 것이 아니라, “최대한 안정적으로” 유지하는 데 있습니다. 제가 경험을 통해 권장하는 센서 → 상태머신 → 모션 합성 → 안전 제한 → 모터 출력의 파이프라인 구조를 분리하면, 장애 발생 확률이 줄고 유지보수성이 극대화됩니다. 특히 PID 튜닝은 숫자만이 아닌 필터, 데드밴드, 가속도 제한을 통합적으로 적용해야만 0.5mm 수준의 정밀하고 자연스러운 인간적인 움직임을 구현할 수 있습니다. 이 글이 실무에서 자연스러운 휴머노이드 얼굴을 만드는 데 도움이 되기를 바랍니다.
Q&A
Q1) 제어 주기를 200Hz로 올리면 더 자연스러워지지 않습니까
- 조건이 맞으면 도움이 될 수 있지만, CPU/통신 부하로 지터가 늘면 오히려 역효과가 날 수 있습니다.
- 실전에서는 50~120Hz를 안정적으로 유지하는 것이 체감 품질에 더 큰 영향을 주는 경우가 많습니다.
Q2) 정지 떨림은 PID로만 잡아야 합니까
- 아닙니다.
- 데드밴드(±0.1~0.2mm), 가속도 제한, 필터링이 같이 들어가야 떨림이 안정적으로 줄어드는 경우가 많습니다.
Q3) 드리프트는 왜 생깁니까
- Ki 누적, 케이블 신장, 온도 변화, 마찰 변화가 복합적으로 작용할 수 있습니다.
- 그래서 주기적 0점 캘리브레이션과 장력 점검이 중요합니다.
Q4) 안전 제한은 어디에 넣는 것이 좋습니까
- 모션 합성 이후, 모터 출력 직전에 “마지막 클램프”로 넣는 편이 안전합니다.
- 이렇게 하면 상위 로직이 잘못돼도 물리적으로 위험한 출력이 나가는 것을 막을 수 있습니다.
Q5) 최소 테스트 1가지만 한다면 무엇을 추천합니까
- 표정 6종을 각 100회 반복하면서 전류 스파이크, 떨림, 지연을 동시에 기록하는 테스트를 추천합니다.
- 얼굴은 “한 번 성공”보다 “100번 반복 성공”이 품질을 결정합니다.
실제 운영 환경에서는 사용자의 접촉(터치)과 발화가 동시에 발생하는 경우가 많으므로, 센서 이벤트가 들어올 때 표정 강도를 자동 감쇠하는 정책을 함께 두면 안전성과 자연스러움을 동시에 올릴 수 있습니다.
'휴머노이드 얼굴 > 1. 시스템 설계 및 핵심 아키텍처' 카테고리의 다른 글
| 휴머노이드 얼굴과 조명 반응 시스템: 얼굴의 “표정”은 빛이 절반입니다 (0) | 2025.12.18 |
|---|---|
| 휴머노이드 얼굴 구조의 모듈화(서브페이스) 설계 방식: 유지보수 40% 단축을 목표로 하는 구조 전략 (0) | 2025.12.17 |
| 미래형 휴머노이드 얼굴 기술 로드맵: 2030년까지 40축+와 ‘자가 학습 표정’이 표준이 될 수 있습니다 (0) | 2025.12.13 |
| 휴머노이드 얼굴 비례(비율) 설계 원칙: 1:1.618은 참고값, 안정감은 ‘허용 범위’에서 만듭니다 (0) | 2025.12.11 |
| 휴머노이드 얼굴 프레임 설계 과정: 3D 프린트 재질(PLA·ABS·Nylon)과 강성·정렬·유지보수 기준 (0) | 2025.12.10 |
| 휴머노이드 얼굴 표현 원리: 인간 43개 근육 vs 12~24축(DOF) 구조 비교 (0) | 2025.12.09 |