
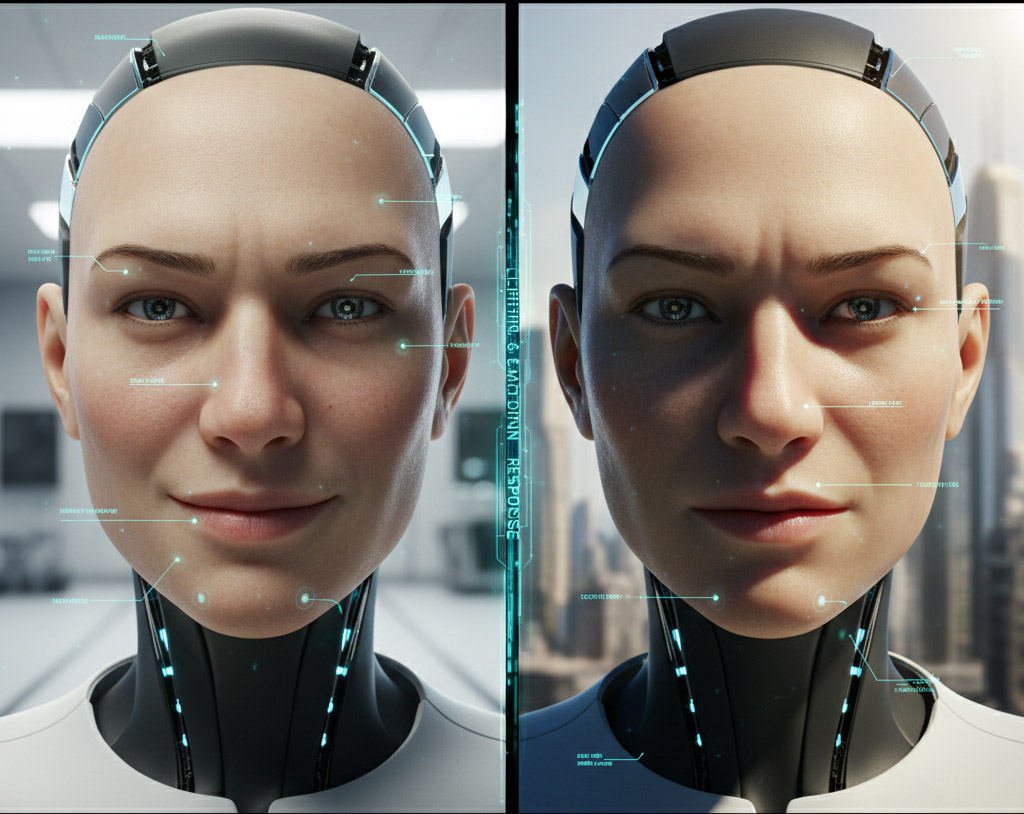
휴머노이드가 아무리 정교한 표정을 지어도, 주변 조명 환경이 바뀌면 인상은 완전히 달라집니다. 제가 수년간 휴머노이드 얼굴 시스템을 연구하며 얻은 경험으로 미루어 볼 때, 실내 환경에 맞춰진 얼굴이 실외 직사광선 아래에서 눈과 코 주변에 강한 그림자가 지면서 순식간에 “차갑거나 무서운” 느낌을 줄 수 있습니다. 이것은 로봇의 표정 문제 이전에 빛의 문제입니다.
따라서 고급 휴머노이드 개발에서는 표정 구동 엔진만큼이나 조명 반응 시스템의 설계가 매우 중요합니다. 이 시스템은 단순히 밝기를 보정하는 수준을 넘어, 그림자(Shadow)와 하이라이트(Highlight)를 정밀하게 제어하여 로봇이 주는 인상과 사용자 신뢰도를 안정적으로 유지하는 핵심 기능입니다.
이 글에서는 조명 변화에 흔들리지 않는 휴머노이드 얼굴을 만들기 위해 필요한 조명 감지, 얼굴 재질/스킨톤 제어, 보조 하이라이트(LED/디스플레이) 적용, 그리고 시스템 운영 가드레일을 실무적인 수치와 제 경험을 중심으로 깊이 있게 분석해 보겠습니다.
핵심 요약 및 기술적 난이도
- 조명은 얼굴의 “두 번째 표정 요소”입니다. 동일한 표정이라도 그림자 깊이에 따라 위압감이나 친근감이 극단적으로 바뀝니다.
- 조명 반응 시스템은 4단계의 파이프라인(감지 → 재질/광택 → 보조 → 가드레일)으로 구성되며, 각 단계의 동기화 오차 제어가 가장 큰 기술적 난이도입니다.
- 실내·실외 조명 조건을 철저히 분리 테스트해야 하며, 직사광선이나 역광 상황에서 발생하는 그림자 왜곡은 특히 언캐니 밸리(Uncanny Valley)를 쉽게 유발합니다.
- 안정적인 사용자 경험을 위해 표정/시선 전환 시간은 0.3~0.8초로 유지하고, 이 모든 요소의 동기화 오차는 200ms 이하를 목표로 설계해야 합니다.
1) 조명이 휴머노이드 인상에 미치는 심층 영향 3가지
- 1) 그림자의 미묘한 심리적 효과: 표정을 '덧칠'합니다
- 눈 밑 그림자: 사용자에게 피곤함, 불안정함, 혹은 위협의 신호로 잠재 의식 속에 해석될 수 있습니다. 특히 휴머노이드에서 그림자가 깊어지면 차가운 인상을 주기 쉽습니다.
- 코 옆 그림자: 과도하게 깊은 그림자는 얼굴 윤곽을 날카롭고 인위적으로 보이게 만듭니다.
- 2) 하이라이트의 재질감 노출: '생기'와 '인공물'의 경계
- 점(點) 하이라이트: 광택이 높은 재질에서 발생하며, 얼굴을 플라스틱, 실리콘, 또는 라텍스 같은 비인간적인 인공물처럼 보이게 합니다.
- 퍼지는 하이라이트: 반무광(Semi-Gloss) 재질에서 주로 나타나며, 피부의 자연스러운 느낌을 강화합니다. 그러나 이마나 뺨에서 과도하게 퍼지면 번들거림으로 인식되어 부정적입니다.
- 3) 카메라/센서의 신뢰성 저하: 언캐니 밸리의 직접적 원인
- 광학 노이즈: 급격한 조명 변화는 얼굴 인식/시선 추적용 카메라의 노출(Exposure) 값을 흔들리게 합니다.
- 동기화 깨짐: 추적 오차가 늘어나면 로봇의 표정 변화와 시선 이동 간의 시간차(동기화 오차)가 커져, 인간이 가장 민감하게 반응하는 언캐니 밸리 현상을 유발하게 됩니다.
2) 조명 반응 시스템의 4단 파이프라인 (실무적 구성)
- 단계 1: 조명 환경 감지 및 분류 (Detection)
- 조도 센서 값과 카메라 영상의 히스토그램/얼굴 영역(ROI) 평균 밝기를 복합적으로 분석해 환경을 ‘고대비 역광’, ‘실내 확산광’, ‘실외 직사광’ 등으로 정확히 분류합니다.
- 단계 2: 얼굴 재질/광택 프로파일 전환 (Profile Selection)
- 감지된 환경 조건에 따라 미리 정의된 스킨톤(색온도) 및 광택 프로파일을 동적으로 전환합니다. 제가 경험한 바로는, 광택이 강한 유광 프로파일은 하이라이트를 쉽게 튀게 하여 인상을 차갑게 만들 수 있어, 대부분의 상황에서는 반무광(Semi-Matt) 프로파일이 가장 안정적인 대안으로 선택됩니다.
- 단계 3: 보조 하이라이트 및 그림자 보정 (Shadow Correction)
- 어둡게 그림자가 진 영역에 매우 부드러운 ‘필 라이트(Fill Light)’ 보정을 넣어 인상을 안정화합니다. 눈가나 볼 주변의 미세한 LED를 활용하며, 이는 감정 보조 표시 기능과도 통합되어 설계될 수 있습니다.
- 단계 4: 표정/시선 가드레일 적용 (Operational Guardrail)
- 조명 변화가 감지된 불안정한 상황에서는 로봇의 표정 강도를 의도적으로 0.2~0.4 사이로 낮추고, 급격한 표정 전환 속도를 피하도록 시스템적으로 제어합니다. 전환 속도와 동기화 오차의 수치적 가드레일 준수가 핵심입니다.
3) 조명 감지 방식의 안정성 확보: '센서 융합'의 중요성
- 1) 조도 센서의 한계:
- 장점: 구현이 간단하고 전력 소모가 적습니다.
- 단점: 빛의 방향성(정면광 vs 역광)을 파악할 수 없어 그림자 보정에 대한 정밀한 판단이 제한됩니다.
- 2) 카메라 기반 정밀 분석:
- 장점: 얼굴 영역(ROI)의 그림자 깊이와 하이라이트의 분산 정도를 영상으로 직접 파악하여 가장 정밀한 보정 지시를 내릴 수 있습니다.
- 단점: 카메라 자체의 노출 및 화이트밸런스 보정 기능에 따라 분석 값이 쉽게 흔들려, 불안정성이 높습니다.
- 3) 혼합 방식(센서 융합)의 실무적 대안:
- 결론: 현장 적용에서는 밝기(조도 센서)와 방향성/대비(카메라 분석)를 동시에 추정하는 센서 융합 방식이 가장 신뢰도 높은 데이터를 제공하며, 시스템의 안정성을 극대화합니다.
4) 스킨톤과 광택 설계의 기술적 접근: Lab* 색 공간 활용
- 스킨톤의 안정적 재현:
- 저희는 Lab* 색 공간 개념을 활용하여 ‘조명 변화에 관계없이 일정한 인상을 주는 톤’을 목표로 삼았습니다. 이는 인간의 시각을 기준으로 하는 색 공간이므로, 환경이 바뀌어도 색채 안정성을 높일 수 있습니다.
- 광택(Gloss) 프로파일 제어의 전략:
- 유광: 생기와 입체감을 극대화하지만, 하이라이트가 ‘점’으로 튀어 인공적인 장난감 느낌을 줄 위험이 가장 높습니다.
- 무광: 하이라이트 없이 가장 안정적이지만, 얼굴에 생기가 없어 보여 친근감이 감소하는 문제가 있습니다.
- 반무광(Semi-Gloss): 하이라이트가 부드럽게 분산되도록 표면 미세 패턴을 설계하여, 안전하면서도 자연스러운 중간 지점을 제공합니다. 현장형 로봇에서 가장 선호되는 프로파일입니다.
- 표면 미세 텍스처의 역할:
- 0.1mm 수준의 미세 패턴(Micro-Pattern)을 표면에 적용하여, 들어오는 빛을 무작위로 분산시켜 하이라이트의 점 현상을 막고 자연스러운 피부 질감을 재현합니다. 다만, 이 패턴이 너무 과하면 오히려 인공적인 질감을 부여할 수 있어 설계 시 균형이 매우 중요합니다.
5) 보조 하이라이트 설계의 실질적 적용: '빛으로 얼굴 고치기'
- 방식 1: 눈/볼 주변 미세 LED를 이용한 '필 라이트' 보정
- 원리: 카메라로 그림자 영역을 감지하고, 해당 영역에 위치한 미세 LED를 저강도(Low Intensity)로 켜서 그림자를 부드럽게(Softly) 완화(Fill)합니다.
- 장점: 인상이 급격히 위압적으로 변하는 것을 효과적으로 막고, 필요시 감정 보조 표시 역할까지 겸할 수 있습니다.
- 방식 2: 디스플레이 기반의 동적 하이라이트 표현
- 원리: 눈동자나 얼굴 일부를 디스플레이로 표현하는 플랫폼에서, 화면 밝기를 이용하여 반사광처럼 보이는 하이라이트를 프로그래밍하는 방식입니다.
- 주의: 현실의 반사광을 완벽하게 모방하기 어려워, 과도할 경우 ‘만화풍(Cartoonish)’으로 보일 위험이 있어 강도 상한선을 엄격히 설정해야 합니다.
- 방식 3: 물리적 반사 구조물(리플렉터) 활용
- 원리: 얼굴 구조 설계 단계에서 특정 각도로 들어오는 빛을 원하는 방향으로 부드럽게 반사시키는 미세한 구조물(Reflector)을 미리 삽입합니다.
- 장점: 전력을 사용하지 않고도 하이라이트 분산 효과를 얻을 수 있어, 시스템 유지 및 운영비를 절감할 수 있습니다.
6) 조명 변화에서 언캐니를 최소화하는 운영 가드레일 (수치 기준)
- 가드레일 1 (표정 강도): 역광 또는 고대비 환경이 감지될 경우, 표정의 강도(Degree of Expression)를 0.2~0.4 범위로 자동 제한하여 과한 그림자 왜곡을 통한 인상 변화를 사전 방지합니다.
- 가드레일 2 (전환 속도): 표정/시선/조명 보정의 전환 속도를 항상 0.3초에서 0.8초 사이의 완만한 속도로 유지하고, 급격한 가속/감속(Jerk)을 피합니다.
- 가드레일 3 (동기화 오차): 로봇의 표정, 시선, 음성, 그리고 조명 보정 이 모든 요소의 동기화 오차(Synchronization Latency)를 200ms 이하로 유지하는 것을 최우선 목표로 합니다.
- 가드레일 4 (보정 조건): 보조 하이라이트 보정 시스템은 ‘항상 켜짐(Always On)’이 아니라, ‘역광/실외’ 등 특정 조건에서만 활성화되도록 설계하여 부자연스러움을 줄입니다.
- 가드레일 5 (프로파일 분리): 얼굴 광택 및 스킨톤 프로파일은 최소한 ‘실내 확산광’과 ‘실외 직사광’ 두 가지 프로파일로 분리 운영되어야 합니다.
- 가드레일 6 (단계적 보정): 조명 변화가 감지된 후, 보정 값을 한 번에 크게 바꾸지 않고 0.1초 단위의 단계적(Incremental) 변화를 주어 사용자에게 변화가 인지되지 않도록 합니다.
7) 연구 및 현장 적용 실패 사례 7가지: '하루' 단위의 변화 대응 난이도
- 사례 1 (그림자 위압감): 실외 직사광 테스트 시, 태양의 각도 변화에 따라 코/눈 아래 그림자가 급격히 깊어져 로봇의 인상 점수(Trust Score)가 크게 하락했습니다.
- 사례 2 (유광 표면의 실패): 광택 처리가 과한 표면은 하이라이트를 ‘점’처럼 튀게 만들었고, 관람객들에게 “값싼 플라스틱 장난감 같다”는 피드백을 받았습니다.
- 사례 3 (과도한 LED 보정): LED 보정 강도가 높아지자 얼굴이 “항상 밝은 필터”가 씌워진 것처럼 인위적으로 보였고, 사용자들이 이질감을 호소했습니다.
- 사례 4 (동기화 문제): 카메라의 노출 변화로 시선 추적 값이 튀었고, 이로 인해 표정 전환과 시선 이동 간의 오차가 250ms를 초과하여 언캐니 밸리가 극심하게 발생했습니다.
- 사례 5 (색채 안정성 부족): 특정 실내 LED 조명(고색온도) 아래에서 스킨톤이 의도치 않게 붉은색으로 치우쳐 보이는 현상이 반복적으로 발생했습니다.
- 사례 6 (전환 충돌): 조명 보정 시스템이 작동할 때 표정 전환도 동시에 일어나, 마치 로봇이 ‘깜빡이거나 버벅거리는’ 것처럼 사용자에게 체감되었습니다.
- 사례 7 (무광의 한계): 생기를 높이기 위해 무광 처리를 과하게 하자, 얼굴의 입체감이 사라지고 친근감이 크게 감소하는 역효과가 발생했습니다.
관련 글
- 휴머노이드 얼굴의 눈 감정 표현 디자인
- 휴머노이드 얼굴 LED 기반 ‘감정 보조 표시’ 시스템 기술 분석
- 휴머노이드 얼굴 색채(스킨톤) 재현 과학
- 휴머노이드 얼굴의 표정 불일치(언캐니) 해결 전략
- 휴머노이드 얼굴의 실외 환경 대응 설계
결론
- 휴머노이드 얼굴에서 조명은 더 이상 단순한 환경 변수가 아닙니다. 그것은 로봇이 전달하는 감정과 인상을 규정하는 핵심 디자인 요소입니다.
- 이 글에서 제시한 조명 감지 → 재질/광택 프로파일 → 보조 하이라이트 → 표정/시선 가드레일로 이어지는 4단계 시스템은 실내외 환경 변화에 관계없이 로봇의 인상을 안정화하는 가장 실용적인 접근법입니다.
- 특히 전환 0.3~0.8초, 동기화 오차 200ms 이하라는 수치 기반의 운영 가드레일을 엄격히 준수하는 것이, 우리가 가장 피해야 할 언캐니 밸리 현상을 줄이는 가장 현실적이고 신뢰도 높은 방안임을 다시 한번 강조합니다.
Q&A
Q1) 조명 반응 시스템이 꼭 필요한가요
- 실내 고정 환경이라면 시스템을 단순화할 수 있습니다.
- 하지만 실외, 이동 환경, 또는 역광과 같은 극한 환경이 예상될 경우, 최소한의 감지 기능과 수치 기반 가드레일만이라도 적용하는 것이 로봇의 신뢰성을 크게 높이는 데 유리합니다.
Q2) LED 보정은 왜 조심해야 하나요
- 보정 강도가 과도하게 높으면, 얼굴이 현실의 그림자 법칙을 따르지 않는 ‘항상 밝은 필터’처럼 보여 부자연스러움을 유발합니다.
- 반드시 역광이나 실외와 같은 특정 고대비 조건에서만 활성화하고, 단계적인 보정을 통해 사용자가 인지하지 못하게 처리해야 합니다.
Q3) 광택은 무광이 정답인가요
- 정답은 없습니다. 유광은 하이라이트가 튀는 문제가 있고, 무광은 생기가 사라져 친근감이 떨어집니다.
- 따라서 반무광 설계에 미세 패턴을 적용하여 자연스러운 하이라이트 분산을 유도하는 것이 실무적으로 가장 안정적인 해결책입니다.
Q4) 조명 때문에 언캐니가 생기는 대표 패턴은 무엇인가요
- 대표적으로 그림자가 너무 깊어져 미소 같은 긍정적인 표정이 위협적으로 왜곡되는 경우와, 조명 변화로 인해 시선 추적이 불안정해져 표정-시선 간 동기화 오차가 200ms를 초과하는 경우입니다.
Q5) 가장 먼저 적용할 수 있는 최소 조치 1가지는 무엇입니까
- 역광/고대비 상태에서 로봇의 표정 강도를 0.2~0.4로 낮추고, 표정 전환 시간을 0.3~0.8초로 유지하는 운영 가드레일을 시스템에 적용하는 것이 최소 비용으로 가장 큰 효과를 볼 수 있는 현실적인 조치입니다.
조명은 얼굴에 “필터”를 씌웁니다.
필터가 매번 바뀌는데 표정만 그대로라면, 사람은 그 차이를 바로 알아차립니다.
'휴머노이드 얼굴 > 1. 시스템 설계 및 핵심 아키텍처' 카테고리의 다른 글
| 휴머노이드 얼굴 디지털 트윈 구축 기술: “고장 나기 전에 고장 날 곳을 미리 보는” 얼굴의 복제본 (0) | 2025.12.22 |
|---|---|
| 휴머노이드 얼굴 물리 기반 애니메이션(PBD) 적용: 실리콘이 “살처럼” 움직이게 만드는 실시간 변형 엔진 (0) | 2025.12.21 |
| 휴머노이드 얼굴에서 코 구조의 공기 흐름 모델링: “숨소리”는 입보다 코에서 더 현실적으로 들립니다 (0) | 2025.12.21 |
| 휴머노이드 얼굴 구조의 모듈화(서브페이스) 설계 방식: 유지보수 40% 단축을 목표로 하는 구조 전략 (0) | 2025.12.17 |
| 미래형 휴머노이드 얼굴 기술 로드맵: 2030년까지 40축+와 ‘자가 학습 표정’이 표준이 될 수 있습니다 (0) | 2025.12.13 |
| 휴머노이드 얼굴 전체를 제어하는 펌웨어 구조: 50~120Hz 제어 주기로 표정이 “떨리지 않게” 만듭니다 (1) | 2025.12.13 |