
수년 간 휴머노이드 얼굴 시스템을 설계해 온 경험에 비추어 볼 때, 사용자가 로봇에게 "살아있음"을 느끼는 순간은 시각적인 완벽함뿐만 아니라, 예상치 못한 미세한 생체 기척에서 결정되는 경우가 많았습니다. 특히 코 주변의 미세한 숨소리, 아주 작은 기류 변화, 그리고 온도 및 습도의 변화는 사용자의 무의식 속에 생체감(Biotic Feel)을 강력하게 주입하는 핵심 요소입니다. 코가 단순한 장식이거나 정적인 인상을 준다면, 오히려 조용한 환경에서 언캐니 밸리(Uncanny Valley)를 심화시킬 수 있습니다.
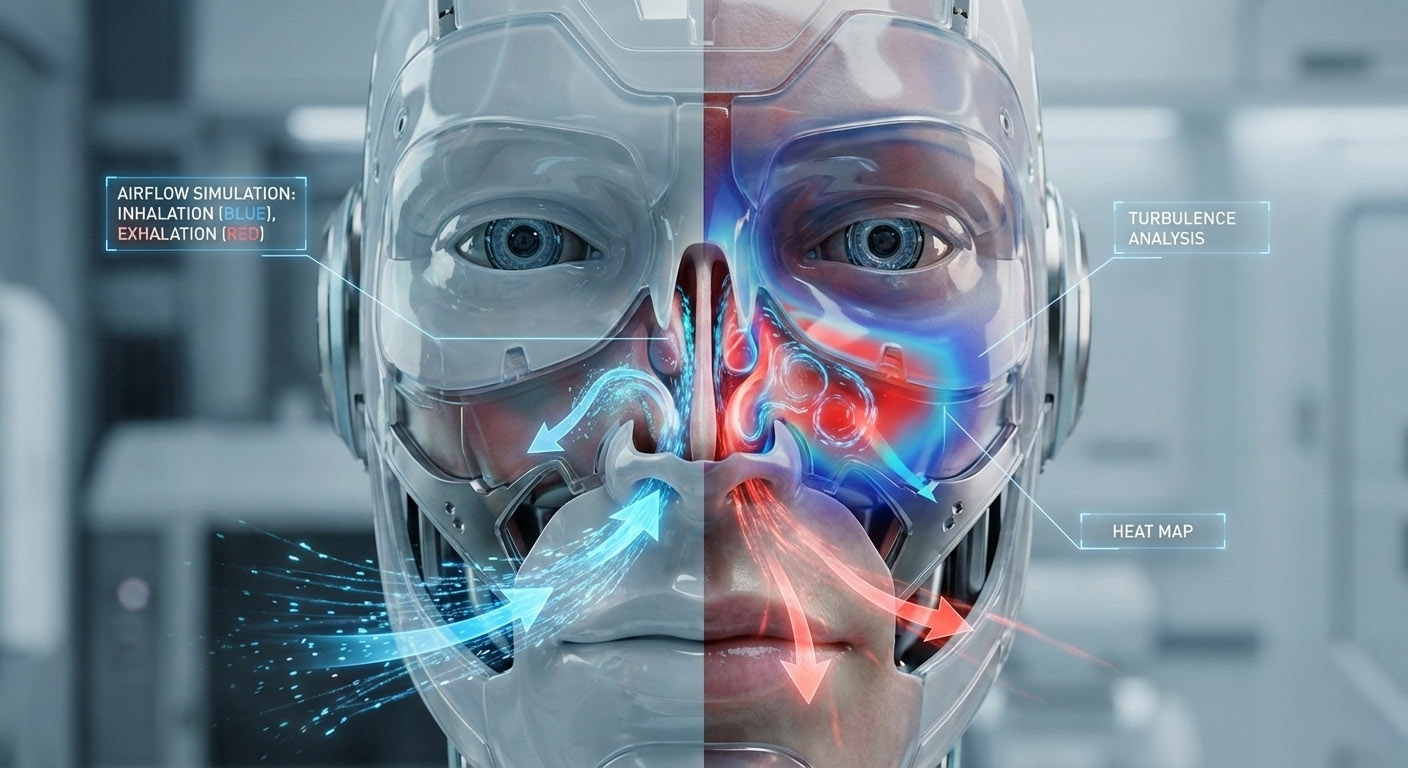
따라서 코 구조의 공기 흐름 모델링은 단순한 '숨소리 오디오 효과'가 아니라, 내부의 정밀한 전자 부품을 보호하고 사용자 반응형 UX를 구동하는 '열관리·결로·센서 연동 시스템'의 핵심 설계로 접근해야 합니다.
이 글에서는 제가 다년간 현장에서 적용해 온 0D/1D/3D 모델의 단계적 선택 기준과 함께, 핵심 설계 파라미터(유량, 저항, 공명), 현장에서 흔히 발생하는 결로 및 소음 문제 해결 경험, 그리고 이 모든 것을 통합하여 생체감을 최대화하는 방법을 수치 예시 중심으로 상세히 정리 합니다.
핵심 요약: 코 모델링의 4가지 동시 해결 과제
휴머노이드 코의 공기 흐름 설계는 다음 4가지 핵심 기능을 동시에 만족시키는 통합적 접근이 필요합니다.
- 숨소리의 자연스러움 최적화: 코 내부 공명 구조를 활용하여 '기계 소리'가 아닌 '호흡 소리'로 필터링합니다.
- 내부 환경 안정성 확보 (결로/김서림 관리): 따뜻한 내부 공기와 외부 냉기가 만나는 지점에서 발생하는 결로를 예방하고 센서의 내구성을 보장합니다.
- 열관리 시스템과의 간섭 최소화: 팬이나 히트싱크 등 내부 발열원과 공기 흐름 채널이 서로 악영향을 주지 않도록 설계합니다.
- 반응형 UX의 트리거 (센서 연동): 사용자 접근 시 발생하는 미세한 온도·습도·기류 변화를 감지하여 자연스러운 표정 변화를 유도합니다.
효율적인 모델 선택 프레임워크 (경험 기반):
- 프로젝트 초기에는 0D(집중 파라미터) 모델로 목표 유량과 압력 손실의 '경계 조건'을 빠르게 설정합니다.
- 디테일이 필요할 때 1D(채널 네트워크) 모델로 전환하여 비강 내부의 분기 및 필터 영향을 분석합니다.
- 3D(전산 유체 역학, CFD) 모델은 0D/1D로 해결되지 않는 특정 지점의 소음 원인(와류)이나 결로 집중 구역을 분석할 때만 사용하는 것이 개발 일정 및 비용 측면에서 효율적입니다.
1) 왜 코 공기 흐름 모델링이 '생체감'에 필수적입니까
수많은 테스트 결과, 휴머노이드의 '생체 리듬'을 사용자에게 전달하는 가장 효과적인 수단 중 하나는 바로 호흡이었습니다.
- 1. 호흡은 '살아있음'을 증명하는 무의식적 신호입니다
- 눈 깜빡임(150~300ms 주기)과 함께 호흡은 사용자에게 "이 로봇은 작동 중이 아니라 살아있다"는 인상을 심어줍니다. 아주 미세한 숨소리만으로도 로봇이 멈춰있는 듯한 정적(靜的) 인상을 크게 감소시킬 수 있습니다.
- 2. 까다로운 내부 환경 안정화의 열쇠입니다
- 따뜻하고 습한 내부 공기가 상대적으로 차가운 얼굴 외피(코 주변)와 만나면 결로가 발생합니다. 이 수분은 외관의 광택을 변화시키거나, 특히 코 주변에 배치된 고정밀 센서(온도, 습도, 기류)의 정확도와 수명을 심각하게 저하시키는 주범이 됩니다. 공기 흐름을 제어하는 것은 결로 방지의 시작점입니다.
- 3. 사용자 인터랙션의 '저비용 고효율' 입구 센서입니다
- 저는 코 주변을 "가장 빠르게 변화를 감지하는 영역"으로 정의하고 설계에 활용합니다. 사용자 접근 시 발생하는 미세한 공기 온도(약 ±0.5K) 및 습도 변화를 코 주변 센서로 감지하여, 이를 시선 맞춤이나 미세한 미소(Micro-Expression) 같은 반응형 UX를 구동하는 트리거로 사용하면, 최소한의 비용으로 "사용자에게 반응한다"는 인상을 강하게 줄 수 있습니다.
2) 모델 선택 가이드: 다년간의 개발 경험이 만든 단계적 접근법
휴머노이드 개발 환경은 언제나 '시간과 비용' 제약이 따릅니다. 따라서 비효율적인 3D(CFD) 분석에 매달리기보다는, 제가 확립한 0D → 1D → 3D 단계화 전략이 가장 효율적입니다.
- 0D (집중 파라미터) 모델: 초기 설계의 등대
- 목표: '유량-저항-압력'의 거시적 관계를 빠르게 산출하여 팬/펌프 선택의 근거를 마련합니다.
- 활용 예: 콧구멍의 면적을 ±10% 변경했을 때 발생하는 소음(dB)과 압력 손실(Pa)의 변화를 1차적으로 예측하여, '최대 허용 소음' 내에서 유량을 확보할 수 있는지 신속하게 판단합니다.
- 1D (채널 네트워크) 모델: 내부 디테일 분석 도구
- 목표: 코 내부의 비강 채널, 분기 구조, 밸브(필요시), 그리고 필터가 전체 시스템에 미치는 영향을 배관 시스템처럼 모델링합니다.
- 활용 예: 좌우 콧구멍의 유량 편차를 의도적으로 5~10% 비대칭으로 설정하여, 사람의 코와 유사하게 비대칭 호흡을 연출하는 전략을 검토할 때 유용합니다. 설계 변경(채널 길이/분기 추가)에 대한 민감도를 빠르게 파악할 수 있습니다.
- 3D (CFD) 모델: 최종 문제 해결을 위한 정밀 현미경
- 목표: 난류, 와류, 공명 주파수 등 복잡한 형상에 고유한 문제를 정밀하게 분석하여 '이상 소음'이나 '결로 집중 지점'을 시각화합니다.
- 권장 시점: 0D/1D 분석을 통해 예상치 못한 '휘파람 소리(와류 공명)'나 '특정 센서 표면의 과도한 결로'가 관찰되었을 때만 국한하여 진행합니다. 비필수적인 3D 분석은 개발 기간을 불필요하게 늘릴 수 있습니다.
3) 설계 파라미터 6가지: 생체감-기계감 임계점을 찾다
저는 설계의 일관성과 성공적인 검증을 위해 반드시 숫자로 '경계 조건'을 설정할 것을 강력히 권장합니다. 이 숫자들이 바로 생체감-기계감 임계점을 가르는 기준이 됩니다.
- 1) 목표 유량 (설계의 시작점):
- 실무 예시: 일반 성인의 편안한 호흡 유량(Resting Tidal Volume)을 참고하여, 분당 40~60 L (L/min) 수준의 내부 목표 기준치를 설정합니다. 이 숫자는 "사실적인 유량"보다 "일관된 설계 기준"을 마련하는 것이 핵심입니다. 로봇의 크기와 사용 환경에 따라 이 숫자를 조정합니다.
- 2) 압력 손실 (팬/펌프의 부하):
- 저항이 클수록 요구되는 팬/펌프의 성능이 증가하여 전력 소모와 소음이 증가합니다. 반대로 저항이 너무 작으면 숨소리가 밋밋해져 연출 효과가 사라지므로, 적정 임피던스(저항)를 찾는 것이 중요합니다.
- 3) 채널 길이 및 단면 (공명 특성 조정):
- 코 내부는 사실상 미니 공명관(Mini-Resonator) 역할을 합니다. 채널의 길이(L)와 단면적(A)을 ±10% 수준으로 경험적으로 조정하는 것만으로도, 소리의 특정 주파수 대역 공명을 의도적으로 살리거나 필터링할 수 있습니다.
- 4) 입자 및 먼지 대응 (운영 안정성):
- 전시 환경이나 실외 환경에서는 먼지 유입이 흔합니다. 필터는 위생에 필수지만 저항을 증가시킵니다. 따라서 필터 막힘을 가정한 유량 감소 시뮬레이션을 통해 운영 교체 주기를 명확히 설계해야 합니다.
- 5) 결로 및 습도 대응 (내구성 확보):
- 극단적인 온도차 환경에서는 내부 응결이 필연적으로 발생합니다. 저는 단순히 코팅에 의존하기보다, 결로수가 흘러나갈 수 있는 배수 경로(Drainage Path)와 센서 주변의 물방울 맺힘 방지 보호 구조를 먼저 설계할 것을 권장합니다.
- 6) 소음 기준 (dB) 및 심리적 허용치:
- 조용한 실내(NC-20 환경)에서는 20dB 수준의 작은 소음도 크게 거슬릴 수 있습니다. 목표 소음을 정면 30cm 거리 기준 20~25dB로 설정하고, 특히 고주파 대역의 '휘파람 톤'이 발생하지 않도록 청감 테스트를 엄격하게 진행해야 합니다. 이 휘파람 톤이야말로 언캐니 밸리를 즉각적으로 키우는 주범입니다.
4) 숨소리(호흡음) 생성: 필자의 3단계 통합 접근법
현실적인 숨소리는 단순히 녹음된 소리를 재생하는 것이 아니라, 내부 구조의 물리적 특성과 결합되어야 합니다. 저는 다음과 같은 3단계 접근법을 사용합니다.
- 1) 소스 (노이즈) 생성
- 숨소리의 원천으로 가벼운 핑크 노이즈를 사용하고, 유량에 비례하여 그 크기(Volume)를 조절합니다. 저는 보통 유량 스케일을 0.2(안정시) ~ 0.8(흥분/반응시) 범위로 제한하여, 너무 과장된 기계음을 방지하는 경험적 기준을 사용합니다.
- 2) 필터링 (대역 Shaping)
- 인간의 호흡은 특정 주파수 대역이 부드럽게 필터링된 소리처럼 들립니다. 따라서 단순히 "고성능 스피커"를 사용하는 것보다, 코 내부 공기 채널 자체가 노이즈를 자연스럽게 필터링하도록 설계하는 것이 훨씬 중요합니다.
- 3) 공명 (코 내부 캐비티 활용)
- 코 구조 내부에 작은 공명 공간(Acoustic Cavity)을 의도적으로 설계하면, 동일한 노이즈 소스로도 훨씬 풍부하고 생체감이 높은 소리를 연출할 수 있습니다. 주의: 설계 시 공명이 과도해지면 좁은 채널에서 '에지 톤(Edge Tone)'이 발생하여 즉시 휘파람 소리로 변질되므로, 3D/CFD 검증이 필수적입니다.
5) 센서 활용: 코를 통한 '반응형 표정' 설계
코 주변에 배치되는 센서는 단순히 환경을 측정하는 것을 넘어, 로봇의 표정 UX를 구동하는 핵심적인 트리거 역할을 수행합니다.
- 추천 센서 조합 및 배치 (경험적)
- 온도 센서 (서미스터) / 습도 센서: 내부 환경 변화 및 사용자 접근 감지.
- 간이 기류 센서 (차압 센서): 미세한 바람의 움직임 감지.
- 추가: 적외선 (IR) 센서: 코 주변 외피 아래에 배치하여 사용자의 체열 접근을 비접촉으로 빠르게 감지하는 용도.
- UX 연동 설계 예시
- 사용자 접근 감지: (IR/온도 센서 값 ↑) → 반응 지연 시간 분석 (경험적 상한선 200ms 설정) → 시선 맞춤 + 미세 미소 (0.3~0.5mm 수준) → 호흡음 미세 증가 연출.
- 이때 반응 지연 시간이 100ms를 초과할수록 사용자의 "기다리고 있다"는 인상이 커지므로, 시스템 상한선을 설정하고 최적화하는 것이 중요합니다.
6) 시험 방법: '안정성'과 '심리적 허용치' 중심의 통합 테스트
저는 공학적 수치 테스트와 사용자 심리 테스트를 결합한 통합 검증 절차를 사용합니다.
- 1) 유량/저항 시험 (Engineering Bench Test)
- 팬/펌프 구동 시 목표 유량(예: 40~60 L/min)이 달성되는지, 그리고 좌우 콧구멍의 유량 편차가 설계 의도(예: 5~10% 비대칭)와 일치하는지 계측기로 검증합니다.
- 2) 결로/습도 시험 (Environmental Test)
- 온도차 극복 시험: 내부 온도 30°C / 습도 80%와 외부 온도 10°C / 습도 50% 같은 극한 조건에서 내부 응결이 어디에 집중되는지 확인합니다. 센서 표면의 물방울 맺힘으로 인한 신호 왜곡 현상(Spike)을 반드시 포착해야 합니다.
- 3) 소음 시험 및 청감 테스트 (Acoustic & Psychoacoustic Test)
- dB 측정: 정면 30cm, 50cm 거리에서 dB를 측정하여 목표 기준(예: 20~25dB)을 만족하는지 확인합니다.
- 청감 테스트: 다양한 연령대의 참가자에게 '작은 휘파람 톤'이나 '기계 작동음'이 들리는지 반복적으로 청취시켜 심리적 허용치를 검증합니다.
7) 다년간 경험한 7가지 주요 실패 사례와 교훈
실패 사례는 다음 개발을 위한 가장 중요한 자산입니다. 제가 수년간 현장에서 겪은 대표적인 실패와 그 교훈을 공유합니다.
- 사례 1 (소음 우위): 유량 확보를 위해 팬 성능을 올리자, 호흡음의 생체감보다 팬 소음의 기계감이 대화에 섞여 로봇의 인상이 급격히 저하되었습니다. 교훈: 목표 유량을 하향 조정하고 0D 모델에서 소음 제한 조건을 1순위로 설정해야 합니다.
- 사례 2 (공명 불량): 코 내부 구조가 특정 각도와 유량 조건에서 불필요한 공명 주파수를 만들어내어, 마치 휘파람 소리처럼 들려 즉시 언캐니 밸리를 크게 키웠습니다. 교훈: 3D CFD 분석을 통해 와류 발생 지점을 조기에 파악하고 디자인을 수정해야 합니다.
- 사례 3 (센서 오작동): 결로로 인해 습도 센서에 물방울이 맺히자 신호가 튀면서, 호흡 연출이 과장되거나 갑자기 끊기는 현상이 발생했습니다. 교훈: 센서 주변에 배수 경로를 설계하거나 소수성(Hydrophobic) 보호 구조를 적용해야 합니다.
- 사례 4 (운영 막힘): 전시 환경에서 필터가 빠르게 막히자 유량이 급격히 떨어져 숨소리가 완전히 사라졌고, 결과적으로 로봇 얼굴이 '정지된 마네킹'처럼 보였습니다. 교훈: 필터 교체 주기 및 막힘 감지 센서를 통한 사용자 알림 시스템을 도입해야 합니다.
- 사례 5 (비대칭 과도): 좌우 콧구멍의 유량 편차를 너무 크게 설계하여, 겉으로 보기에도 한쪽 콧구멍만 들썩이는 듯한 부자연스러운 인상이 생겼습니다. 교훈: 비대칭 편차는 시각적으로 감지되지 않는 5~10% 이내로 제한해야 합니다.
- 사례 6 (악취/오염): 코 내부의 습기와 먼지 축적으로 악취가 발생하여 장기간 운영에 중단 이슈가 생겼습니다. 교훈: 항균 재질 검토와 주기적인 소독/청소 경로를 설계에 반영해야 합니다.
- 사례 7 (일관성 부족): 호흡 연출이 로봇의 상태(대기 중, 대화 중, 감정 연출 중)와 무관하게 일정하여 '단순 반복'하는 연기처럼 느껴졌습니다. 교훈: 상황별 (호흡음 크기, 유량 스케일) 변조 매트릭스를 UX 기획 단계에서부터 정의해야 합니다.
관련 글
- 휴머노이드 얼굴의 열관리 시스템
- 휴머노이드 얼굴용 적외선(열) 표정 감지 센서
- 휴머노이드 얼굴용 고정밀 센서 퓨전 기술
- 휴머노이드 얼굴의 표정 일관성 유지 기술
- 휴머노이드 얼굴의 실시간 상태 모니터링
결론 및 최종 제언
코 공기 흐름 모델링은 단순히 시각적/청각적 연출을 넘어, 로봇의 장기 운영 안정성(결로, 먼지, 열)과 사용자 경험(반응형 UX)을 통합하는 복합 공학 영역입니다. 저는 0D/1D 기반의 수치적 경계 설정과 3D의 문제 해결을 병행하고, 여기에 심리적 허용치(소음, 비대칭)를 기준으로 검증하는 통합 프로세스를 강력히 제언합니다. 운영 환경과 연계된 필터 교체 주기 및 결로 대응 기준을 함께 설계하는 것이 성공적인 휴머노이드 프로젝트의 핵심입니다.
Q&A
Q1) 코에 꼭 실제 공기 흐름이 있어야 합니까?
- 필수 사항은 아닙니다. 하지만 조용한 환경에서 생체감을 크게 높이는 가장 저비용 고효율의 방법입니다. 다만 소음과 결로 문제를 감수해야 하므로, 목표 UX의 사실성(Realistic Level)을 기준으로 결정하는 것이 현명합니다.
Q2) 가장 먼저 잡아야 할 숫자 1개는 무엇입니까?
- 저는 '목표 유량 (내부 기준치)'을 가장 먼저 잡습니다. 이 유량이 정해져야 저항, 소음의 상한선, 팬/펌프 선택, 그리고 코 내부의 공명 채널 설계까지 모두 일관되게 진행될 수 있습니다.
Q3) 숨소리는 스피커로만 만들면 되지 않습니까?
- 스피커만 사용할 경우 소리가 '발생 장치'처럼 느껴지기 쉽습니다. 코 내부의 물리적 공명 구조가 소리를 한번 더 '필터링'하여 '호흡'처럼 들리게 만드는 것이 중요합니다. 노이즈 → 필터 → 공명의 3단 설계를 추천합니다.
Q4) 결로는 어떻게 다루는 것이 가장 현실적입니까?
- 코팅이나 재질 개선에 앞서, 결로가 모이는 지점과 배수 경로(Drainage)를 확보하는 것이 1순위입니다. 센서 주변의 구조적 보호가 이뤄진 후, 다음 단계로 친수/소수 코팅을 고려해야 시행착오가 줄어듭니다.
Q5) 코 모델링이 표정 UX에도 도움이 됩니까?
- 큰 도움이 됩니다. 코 주변의 온도 및 기류 변화를 감지하는 것은 사용자 접근을 가장 빠르게 감지하는 방법 중 하나입니다. 이를 통해 시선 처리, 미소 같은 반응형 표정을 더 자연스럽게, 그리고 지연 없이 트리거할 수 있습니다.
최종 제언: 체험형 전시 같은 고부하 환경에서는 '예쁘게 들리는 숨소리'보다, '거슬리지 않는 안정성(소음, 결로, 막힘)'이 장기적으로 더 높은 사용자 만족도를 제공합니다. 설계 시 운영 환경의 리스크(먼지, 온도차)를 반영하여 안전 마진을 충분히 확보하십시오.
'휴머노이드 얼굴 > 1. 시스템 설계 및 핵심 아키텍처' 카테고리의 다른 글
| 휴머노이드 얼굴의 비대칭 설계 철학: 완벽한 대칭이 오히려 어색한 이유 (0) | 2025.12.27 |
|---|---|
| 휴머노이드 얼굴 디지털 트윈 구축 기술: “고장 나기 전에 고장 날 곳을 미리 보는” 얼굴의 복제본 (0) | 2025.12.22 |
| 휴머노이드 얼굴 물리 기반 애니메이션(PBD) 적용: 실리콘이 “살처럼” 움직이게 만드는 실시간 변형 엔진 (0) | 2025.12.21 |
| 휴머노이드 얼굴과 조명 반응 시스템: 얼굴의 “표정”은 빛이 절반입니다 (0) | 2025.12.18 |
| 휴머노이드 얼굴 구조의 모듈화(서브페이스) 설계 방식: 유지보수 40% 단축을 목표로 하는 구조 전략 (0) | 2025.12.17 |
| 미래형 휴머노이드 얼굴 기술 로드맵: 2030년까지 40축+와 ‘자가 학습 표정’이 표준이 될 수 있습니다 (0) | 2025.12.13 |